 TIP: Přetáhni ikonu na hlavní panel pro připnutí webu
TIP: Přetáhni ikonu na hlavní panel pro připnutí webu
")
")
zdravím,mam začátečnickej problémek.Mam sepsan kus snad alespon trosku validniho kodu a potrebuju ho nejak prelozit a naprogramovat do procesoru atm128 ktery se nachazi v ridicim modulu cm5 pro servomotory ax12+ od dynamixelu.
stahnul jsem si AVR kde je programmers notepad ve kterem jsem cosi pokusneho naprogramoval,pak je tam jakejsi software pro generovani makefilu kde jsem volil seriovou komunikaci,procesor atp. (preklad podle nej se mi vsak nepovedl takze asi jsem neco udelal nevalidne nebo jsem mozna ani neprekladal podle meho makefilu ale nejakeho defaultniho,ale snad ne =)
pak je tam program ve kterem to nejspise nahraju nejak primo (v binarce?) do toho procesoru,ted si ale nevzpomenu na nazev.
kdyby se nasel nekdo alepson trosku ochotnej, kdo by mi tu dal nejakou radu nebo malinkej step by step navod , jak dostat muj kod do toho zatracenyho procesoru =)
s pozdravem
DEVi
Fórum › Mikrokontroléry
Robotis cm5 control module with ATM128 CPU

 Nahlásit jako SPAM
Nahlásit jako SPAM IP: 147.229.220.–
IP: 147.229.220.–
") God of flame
God of flamev makefile pro zdrojak v C potrebujes nastavit jen par drobnosti:
zdroj (obvykle bez .c), cil, frekvenci procesoru (hlavne kvuli nastaveni serioveho portu a pokud pouzivas zpozdeni tak taky)
a nekdy i uroven optimalizace (pokud ti optimalizace na velikost nevyhovuje)
no pak ti vznikne hex soubor a ten se musi nejakym zpusobem nahrat do procesoru - existuje nekolik moznosti:
ISP - in circuit serial programing - jedno z jednodusich typu - 4 vodice a zem.. - akorat si to nesmis zablokovat pojistkama
JTAG - tusim i asi jeden vodic navic .. zabira to velkou cast nektereho portu, ale da se uz pak i krokovat program a sledovat promenne ..
Paralelni programovani - to vetsinou jen kdyz mas procesor jeste nezapajenej nebo nutne potrebujes smazat pojistky.. (a ISP + Jtag je vypnut)
Bootloader - k pripravku je primo program, ktery se po restartu mikrokontroleru pripoji pomoci bootloaderu (a vetsinou serioveho portu) v nem...
muze mit i vyvojove prostredi.. ale zalezi jak kdy..
To KIIV:
dekuji za odpoved,jen jsem z ni pochopil bohuzel jen malo...
abych popsal dale jak jsem pokrocil:
rozbehal jsem avr studio od atmelu http://www.atmel.com/forms/download_splash.asp?referer=http://www.atmel.com/dyn/Products/tools_card.asp?tool_id=2725&fn=AvrStudio4Setup.exe
kde muzu kod odsimulovat na zvolenem procesoru atm128, to je sice parada,ale radeji bych zkousel primo na svem zarizeni.
a ja nevim jak to dostat z toho .C ckoveho kodu do hexa a pres jakej software to pak dostat primo do meho ridiciho modulu.
pocitam ze preklad do hexa by mel jit i v tom avr studiu.
zkusim pripojit fotky po vikendu abych lepe ukazal co mam/nemam ;-0
Tomas
Pokud mas AVR studio, tak staci nainstalovat jeste WINAVR a potom zmacknout F7 a ejhle v adresari projektu vznikne hex soubor, ktery uz nahrajes do uC jednim z vyse uvedenych kroku.
Podle toho jaky mas programator, tak to jde bud primo z AVR studia, nebo pokud chces rychle neco nahrat a necekat az prijde postou programator, tak jde zbastlit LPT ISP programator (zadej do googlu) 4 draty, 4 odpory a LPT konektor (pokud mas na pocitaci LPT) a pote lze nahrat SW do uC pres Ponyprog2000 (Windows XP)



takze naprogramovat by to melo jit pres ten ridici modul na kterem je atm128.
jen kdyz otevru avr studio a dam connect ,obevi se mi tabulka ,at vybiram co vybiram,nic nefici.
zkousel jsem treba stk500 a com1 (nebo auto) a nic,porad ze se nechce pripojit:-(
netreba k tomu nejake drivers bo tak neco?
To jsi nekde koupil, nebo sehnal, nebo ti to nekdo postavil?
Idealni by bylo napsat co to je za ovladaci modul, neco pres co by se dalo hledat pres google abych zjistil, co to ma vlastne delat..
Spise bych se priklanel k tomu, ze je to nejaky specialni ovladac, ke kteremu jsou potreba drivery, vetsina ma SW pro ovladani ale uz ne pro preprogramovani FW.
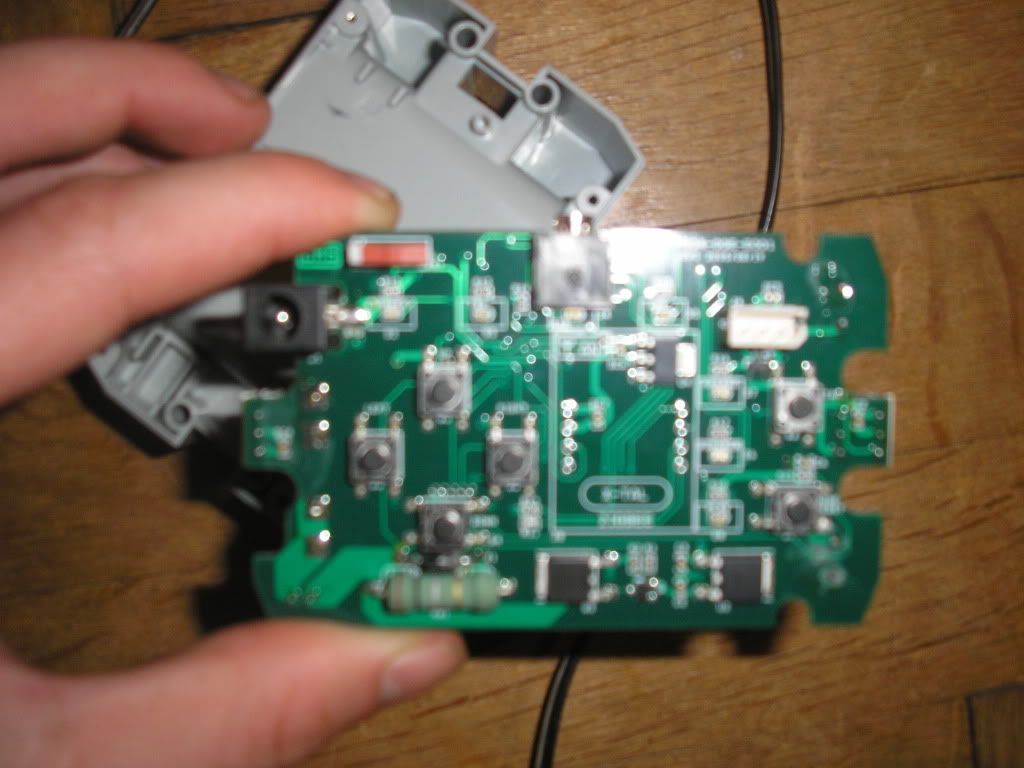
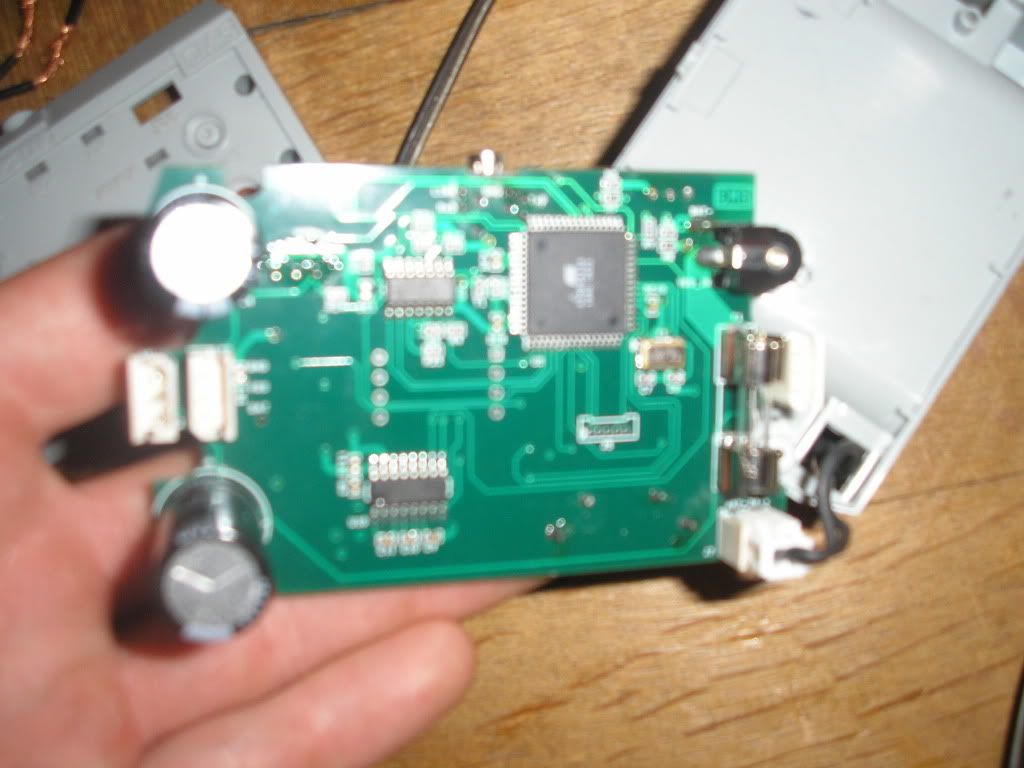
je to CM5 ridici modul od firmy robotis.ovla to servomotory ax-12+ od firmy dynamixel, pochazi to z teto stavebnice:
http://www.megarobot.net/cj/8_produkty_rob_sta_bio.htm
v manulau jsem nasel ze k tomu melo byt cedecko s gcc kompilerem,knihovnama a zkouskovejma programama.bohuzel to mam ze skoly kde se z toho uz rada veci vyhrabala a neni tam ani dokumentace k tomu ani software:-(
klik na odkaz nahore:
http://support.robotis.com/en/
zacinam se tim prokousavat,stahuju snad cd kde by mely bejt vsehcny potrebne knihovny
http://robosavvy.com/forum/viewtopic.php?t=1968&start=0&postdays=0&postorder=asc&highlight=
tady je dobra sajta co se tyce manualu a schemat:
http://robosavvy.com/site/index.php?option=com_openwiki&Itemid=&id=robotis_bioloid
bohuzel cd se deli na kategorie,nasel jsem jen basic kde nejsou knihovny :-(
ale nasel jsem stranku kde nejakej koder udelal vlastni jen se v tom moc nevyznam:
http://robosavvy.com/forum/viewtopic.php?p=18639
at toho neni moc,pockam co na to odbornici v tomto kraji zdejsi :-)
Ahoj.
Dival jsem se na tuhle stranku se schematem http://robosavvy.com/Builders/petej/AX-12_DriverBoard.pdfa pripada mi ze to neni Atmega128, ale AtMega64.
Pokud mas JTAG programator, tak to pripojis na konektor J3 Header 2x5 a melo by to fungovat. Dival jsem se ale na te same strance odkud je to schema na HD fotky, a nejak jsem tam ten konektor nenasel a dokonce na schematu je ten konektor J3 2x, tak jestli to schema nemaji blbe. Na realnem modelu se to sleduje lepe, zkus se podivat na http://www.gme.cz/_dokumentace/dokumenty/958/958-106/dsh.958-106.1.pdf a na desce sledovat kam vedou piny 54,55,56,57 a mel bys najit ten konektor.
P.S. Nechces zacit s necim jednodussim, treba s blikajici LED, nez se pustit do tohodle? Je to sice hezky pripraveny, ale pro zacatecnika nic moc.
Aha takze oprava, foto se neshoduje se schemate, na schematu je ATmega64, na foto ATmega128, ktera ale nastesti pinove odpovida 64. Tak zkus a uvidis.
To DragonSoul:
no,beztak si asi radeji udelam prevodnik(schema jsem sehnal) v podstate ze tripinoveho ovladani servomotoru (dynamixel ax12+) pujdu do usbcka. cm5ku s atmelem uplne vynecham a motory budu ovladat primo vlastnim programem ktery bude posilat pakety primo do motoru.
zvazuj to zkusit v C# nebo Matlabu(ten ma vyhodu ze umi vestavene vypocitat mnoho jinak v C# slozitych funkci,jako treba nejkratsi cestu z bodu A do B (robotic toolbox .
zatim jsem delal jen desktopove aplikace tak to bude boj ale trebas to zvladnu:-),resp. musim:-)
 Zjistit počet nových příspěvků
Zjistit počet nových příspěvků
Přidej příspěvek
Ano, opravdu chci reagovat → zobrazí formulář pro přidání příspěvku
×Vložení zdrojáku
×Vložení obrázku

×Vložení videa
































Uživatelé prohlížející si toto vlákno
Podobná vlákna
MS SQL module pro Python v 2.5.2 — založil Ruda
Module build failed: ReferenceError: [BABEL] — založil ondrej39
User Control — založil Jan
čo je toto za control-u? — založil yterbium
Fan Control C++ — založil Kenvelo
Moderátoři diskuze
