Tak už jsem opravdu zoufalý... :D Kde dělám chybu?
bits 32
Kernel:
mov ebp, 27
mov edi, BMP
mov ebx, 938
mov esi, .imageStruct
call ATA.Read
call ReadKey
mov eax, 300
mov ebx, 200
call DrawImage
call ReadKey
call ReadKey
mov edx, 0
call ClearScreen
jmp short Kernel
.imageStruct:
partitionLength dd 965 ; total sectors count
stateLBA dd 0
taskFile dw 0
DCR dw 0
masterOrSlave db 0xE0
...
%macro delay 0
times 4 in al, dx ; delay 400ns to allow drive to set new values of BSY and DRQ
%endmacro
; do a singletasking PIO ATA read
; inputs: ebx = # of sectors to read, edi -> dest buffer, esi -> driver data struct, ebp = 4b LBA
; Note: ebp is a "relative" LBA -- the offset from the beginning of the partition
; outputs: ebp, edi incremented past read; ebx = 0
; flags: zero flag set on success, carry set on failure (redundant)
ATA.Read:
pushad
test ebx, ebx ; # of sectors < 0 is a "reset" request from software
js short .reset
cmp ebx, 0x3FFFFF ; read will be bigger than 2GB? (error)
stc
jg short .done
mov edx, [esi] ; get the total partition length (sectors)
dec edx ; (to avoid handling "equality" case)
cmp edx, ebp ; verify ebp is legal (within partition limit)
jb short .done ; (carry is set automatically on an error)
cmp edx, ebx ; verify ebx is legal (forget about the ebx = edx case)
jb short .done
sub edx, ebx ; verify ebp + ebx - 1 is legal
inc edx
cmp edx, ebp ; (the test actually checks ebp <= edx - ebx + 1)
jb short .done
mov dx, [esi + 10] ; dx = alt status/DCR
in al, dx ; get the current status
test al, 0x88 ; check the BSY and DRQ bits -- both must be clear
je short .stateOK
.reset:
call ATA.SoftwareReset
test ebx, ebx ; bypass any read on a "reset" request
jns short .stateOK
xor ebx, ebx ; force zero flag on, carry clear
jmp short .done
; preferentially use the 28bit routine, because it's a little faster
; if ebp > 28bit or esi.stLBA > 28bit or stLBA+ebp > 28bit or stLBA+ebp+ebx > 28bit, use 48 bit
.stateOK:
cmp ebp, 0xFFFFFFF
jg short .setRegister
mov eax, [esi + 4]
cmp eax, 0xFFFFFFF
jg short .setRegister
add eax, ebp
cmp eax, 0xFFFFFFF
jg short .setRegister
add eax, ebx
cmp eax, 0xFFFFFFF
.setRegister:
mov dx, [esi + 8] ; dx = IO port base ("task file")
jle short .read28 ; test the flags from the eax cmp's above
.read48:
test ebx, ebx ; no more sectors to read?
je short .done
call PIO48.Read ; read up to 0x100 more sectors, updating registers
je short .read48 ; if successful, is there more to read?
jmp short .done
.read28:
test ebx, ebx ; no more sectors to read?
je short .done
call PIO28.Read ; read up to 0x100 more sectors, updating registers
je short .read28 ; if successful, is there more to read?
.done:
popad
ret
;ATA PI0 28bit singletasking disk read function (up to 0x100 sectors)
; inputs: ESI -> driverdata info, EDI -> destination buffer
; BL = sectors to read, DX = base bus I/O port (0x1F0, 0x170, ...), EBP = 28bit "relative" LBA
; BSY and DRQ ATA status bits must already be known to be clear on both slave and master
; outputs: data stored in EDI; EDI and EBP advanced, EBX decremented
; flags: on success Zero flag set, Carry clear
PIO28.Read:
add ebp, [esi + 4] ; convert relative LBA to absolute LBA
mov ecx, ebp ; save a working copy
mov al, bl ; set al= sector count (0 means 0x100 sectors)
or dl, 2 ; dx = sectorcount port -- usually port 1f2
out dx, al
mov al, cl ; ecx currently holds LBA
inc edx ; port 1f3 -- LBAlow
out dx, al
mov al, ch
inc edx ; port 1f4 -- LBAmid
out dx, al
bswap ecx
mov al, ch ; bits 16 to 23 of LBA
inc edx ; port 1f5 -- LBAhigh
out dx, al
mov al, cl ; bits 24 to 28 of LBA
or al, byte [esi + 12] ; master/slave flag | 0xe0
inc edx ; port 1f6 -- drive select
out dx, al
inc edx ; port 1f7 -- command/status
mov al, 0x20 ; send "read" command to drive
out dx, al
; ignore the error bit for the first 4 status reads -- ie. implement 400ns delay on ERR only
; wait for BSY clear and DRQ set
mov ecx, 4
.lp1:
in al, dx ; grab a status byte
test al, 0x80 ; BSY flag set?
jne short .retry
test al, 8 ; DRQ set?
jne short .dataReady
.retry:
dec ecx
jg short .lp1
; need to wait some more -- loop until BSY clears or ERR sets (error exit if ERR sets)
.waitUntil:
in al, dx ; grab a status byte
test al, 0x80 ; BSY flag set?
jne short .waitUntil ; (all other flags are meaningless if BSY is set)
test al, 0x21 ; ERR or DF set?
jne short .fail
.dataReady:
; if BSY and ERR are clear then DRQ must be set -- go and read the data
sub dl, 7 ; read from data port (ie. 0x1f0)
mov cx, 0x100
rep insw ; gulp one 512b sector into edi
or dl, 7 ; "point" dx back at the status register
delay
; After each DRQ data block it is mandatory to either:
; receive and ack the IRQ -- or poll the status port all over again
inc ebp ; increment the current absolute LBA
dec ebx ; decrement the "sectors to read" count
test bl, bl ; check if the low byte just turned 0 (more sectors to read?)
jne short .waitUntil
sub dx, 7 ; "point" dx back at the base IO port, so it's unchanged
sub ebp, [esi + 4] ; convert absolute lba back to relative
; "test" sets the zero flag for a "success" return -- also clears the carry flag
test al, 0x21 ; test the last status ERR bits
je short .done
.fail:
stc
.done:
ret
;ATA PI0 33bit singletasking disk read function (up to 64K sectors, using 48bit mode)
; inputs: bx = sectors to read (0 means 64K sectors), edi -> destination buffer
; esi -> driverdata info, dx = base bus I/O port (0x1F0, 0x170, ...), ebp = 32bit "relative" LBA
; BSY and DRQ ATA status bits must already be known to be clear on both slave and master
; outputs: data stored in edi; edi and ebp advanced, ebx decremented
; flags: on success Zero flag set, Carry clear
PIO48.Read:
xor eax, eax
add ebp, [esi + 4] ; convert relative LBA to absolute LBA
; special case: did the addition overflow 32 bits (carry set)?
adc ah, 0 ; if so, ah = LBA byte #5 = 1
mov ecx, ebp ; save a working copy of 32 bit absolute LBA
; for speed purposes, never OUT to the same port twice in a row -- avoiding it is messy but best
;outb (0x1F2, sectorcount high)
;outb (0x1F3, LBA4)
;outb (0x1F4, LBA5) -- value = 0 or 1 only
;outb (0x1F5, LBA6) -- value = 0 always
;outb (0x1F2, sectorcount low)
;outb (0x1F3, LBA1)
;outb (0x1F4, LBA2)
;outb (0x1F5, LBA3)
bswap ecx ; make LBA4 and LBA3 easy to access (cl, ch)
or dl, 2 ; dx = sectorcount port -- usually port 1f2
mov al, bh ; sectorcount -- high byte
out dx, al
mov al, cl
inc edx
out dx, al ; LBA4 = LBAlow, high byte (1f3)
inc edx
mov al, ah ; LBA5 was calculated above
out dx, al ; LBA5 = LBAmid, high byte (1f4)
inc edx
mov al, 0 ; LBA6 is always 0 in 32 bit mode
out dx, al ; LBA6 = LBAhigh, high byte (1f5)
sub dl, 3
mov al, bl ; sectorcount -- low byte (1f2)
out dx, al
mov ax, bp ; get LBA1 and LBA2 into ax
inc edx
out dx, al ; LBA1 = LBAlow, low byte (1f3)
mov al, ah ; LBA2
inc edx
out dx, al ; LBA2 = LBAmid, low byte (1f4)
mov al, ch ; LBA3
inc edx
out dx, al ; LBA3 = LBAhigh, low byte (1f5)
mov al, byte [esi + 12] ; master/slave flag | 0xe0
inc edx
and al, 0x50 ; get rid of extraneous LBA28 bits in drive selector
out dx, al ; drive select (1f6)
inc edx
mov al, 0x24 ; send "read ext" command to drive
out dx, al ; command (1f7)
; ignore the error bit for the first 4 status reads -- ie. implement 400ns delay on ERR only
; wait for BSY clear and DRQ set
mov ecx, 4
.lp1:
in al, dx ; grab a status byte
test al, 0x80 ; BSY flag set?
jne short .retry
test al, 8 ; DRQ set?
jne short .dataReady
.retry:
dec ecx
jg short .lp1
; need to wait some more -- loop until BSY clears or ERR sets (error exit if ERR sets)
.waitUntil:
in al, dx ; grab a status byte
test al, 0x80 ; BSY flag set?
jne short .waitUntil ; (all other flags are meaningless if BSY is set)
test al, 0x21 ; ERR or DF set?
jne short .fail
.dataReady:
; if BSY and ERR are clear then DRQ must be set -- go and read the data
sub dl, 7 ; read from data port (ie. 0x1f0)
mov cx, 0x100
rep insw ; gulp one 512b sector into edi
or dl, 7 ; "point" dx back at the status register
delay
; After each DRQ data block it is mandatory to either:
; receive and ack the IRQ -- or poll the status port all over again
inc ebp ; increment the current absolute LBA (overflowing is OK!)
dec ebx ; decrement the "sectors to read" count
test bx, bx ; check if "sectorcount" just decremented to 0
jne short .waitUntil
sub dx, 7 ; "point" dx back at the base IO port, so it's unchanged
sub ebp, [esi + 4] ; convert absolute LBA back to relative
; this sub handles the >32bit overflow cases correcty, too
; "test" sets the zero flag for a "success" return -- also clears the carry flag
test al, 0x21 ; test the last status ERR bits
je short .done
.fail:
stc
.done:
ret
; do a singletasking PIO ata "software reset" with DCR in dx
ATA.SoftwareReset:
push eax
mov al, 4
out dx, al ; do a "software reset" on the bus
xor eax, eax
out dx, al ; reset the bus to normal operation
delay
.lpReady:
in al, dx
and al, 0xC0 ; check BSY and RDY
cmp al, 0x40 ; want BSY clear and RDY set
jne short .lpReady
pop eax
ret
(Potřebuji načíst obrázek ze sektoru 27 při velikosti 938 sektorů za předpokladu, že sektor skýtá 512 byte.)
Děkuji.
 TIP: Přetáhni ikonu na hlavní panel pro připnutí webu
TIP: Přetáhni ikonu na hlavní panel pro připnutí webu


") Grafoman
Grafoman")
")
 Nahlásit jako SPAM
Nahlásit jako SPAM IP: 78.136.176.–
IP: 78.136.176.–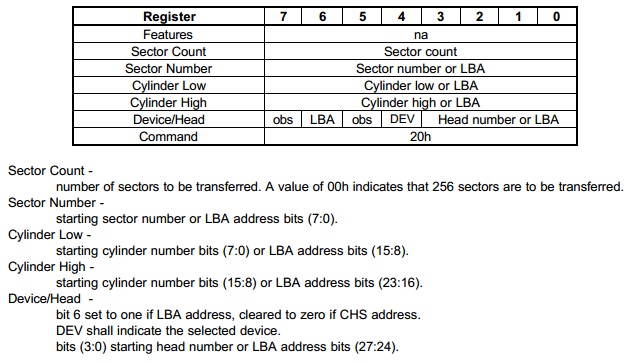

 Nejlepší odpověď
Nejlepší odpověď Zjistit počet nových příspěvků
Zjistit počet nových příspěvků
































